

Tom Knudsen
-
Innholdsteller
13 542 -
Ble med
-
Siste besøk
-
Dager vunnet
86
Innholdstype
Profiler
Forum
Kalender
Alt skrevet av Tom Knudsen
-
Leste i farten "amatørenes fyllefest.... 🤣😆
- 19 svar
-
- 1
-

-
Greit intervju med Flyr-sjef Tonje Wikstrøm Frislid her.. https://finansavisen.no/nyheter/luftfart/2021/11/11/7771329/fa-tv-flyr-sjefen-om-fremtidsplaner-emisjonen-og-faren-for-mer-corona-restriksjoner
-
Tenker de gamblet på markedet or situasjonen der og da. Hadde koronasituasjonen gått bort slik jeg tror de trodde, ville kanskje oppstarten vært en genistrek. Dersom en ny tredje bølge nå inntreffer og ny lockdown uansett hvor stor eller ny meter krav. Vel da kan fort reise virksomheten gå betraktlig ned, noe som ikke vil favorisere et nyoppstartet flyselskap med milliard lån
- 19 svar
-
- 1
-
-
Misunnelse?? La meg heller si det på denne måten, har man ikke noe godt å si om et produkt, så er det bedre å holde kjeft
- 68 svar
-
- 3
-
-
-
God reklame, meesa don't think that is nooo good answer... Alle slike map servere har en server limit og i de fleste tilfeller vil en autolimit funksjon blokkere ip dersom noen forsøker å overbelaste disse. Riktig nok er Google og Azure serverne gigantiske og har sikkert kapasitet til at alle kan laste ned så mye data som mulig, men data er penger og penger er inntjening. Google gjør aldri noe gratis med mindre de kan slenge på ai generert search indexing eller ads på dem. Tror neppe Microsoft tillater den algoritmen i Deres spill eller program, er av grunn at f.eks Microsoft fjernet all Chrome fra Edge sin nettleser pr default. Så alt i alt, blir dette selvsagt kun spekulasjoner, men jo flere som klager til Microsoft noen som skjer i alle fall på alle X-Plane fora jeg har sett, så tror jeg eller håper jeg de blokkerer denne temmelig kjapt. Årsak? Vel dersom noen overbelaster "download" av Ortho fra Google, blir de ip bannet.. Dette må i såfall være unisont for alle.
-
Flyr fikk et resultat før skatt på minus 162,3 millioner kroner i tredje kvartal, som vil si perioden mellom juli og september, fremgår det. Driftsresultat før leasingskostnader (ebitdar) var på minus 142,8 millioner kroner i perioden, mens rent driftsresultat (ebit), var på minus 155,5 millioner kroner. https://e24.no/boers-og-finans/i/g6JJoa/flyr-sjefen-pandemien-er-definitivt-fortsatt-en-utfordring Har du trua på de overlever i et ellers så hektisk, brutal og krevende marked?
-
Tar nok ikke lang tid, flere og flere nå spør Google om hvorfor de får lov til å gjøre dette. Google maps lisence er sykt streng på dette området..
-
Alle rullebaner mener jeg å ha lest skal ha hvite kantmerkinger slik at det skal bli likt over hele Europa Finner dog ikke noe i lovdata om at det skal være hvit eller gul farge, men antar Avinor følger resten av EU. Kanskje de har fått som nevnt over en dispansjasjon på et eller annen måte https://lovdata.no/dokument/SF/forskrift/2006-07-06-968/KAPITTEL_2#§2-5
-
Skal ikke rullebane merkingen på kantline være hvite? Ble ikke det endret.. Finner kun ut at de både kan være gule og hvite dersom jeg leser denne rett https://avinor.no/globalassets/_konsern/kart/datainnsamling-og-innmaling/veiledninger/datainnsamlingsinstruksdetaljertlufthavn4.6_august20212.pdf
-
Godt laget
-
 Honeycomb Alpha og Bravo er lett å programmere i X-Plane, Bravo litt verre siden den har masse lys og announciator. Men det fungerte meget bra det også til slutt.. Kan dessverre ikke hjelpe med P3D og PMDG Du får nok gode resultat ved å titte på noen videoer.
Honeycomb Alpha og Bravo er lett å programmere i X-Plane, Bravo litt verre siden den har masse lys og announciator. Men det fungerte meget bra det også til slutt.. Kan dessverre ikke hjelpe med P3D og PMDG Du får nok gode resultat ved å titte på noen videoer. -
@Ola Haldor Voll😅

- 71 svar
-
- 1
-
-
Hvorfor er dette nå blitt en faktor?
-
Hvorfor betale når man kan få det gratis
- 127 svar
-
- 1
-
-
Skader ikke med litt humor blant all tweaking og frustrasjon, hvem av disse er dere?
- 71 svar
-
- 3
-
-
-
Progresjon tar tid, enten det går sakte eller fort.
- 5 svar
-
- 3
-
-
-
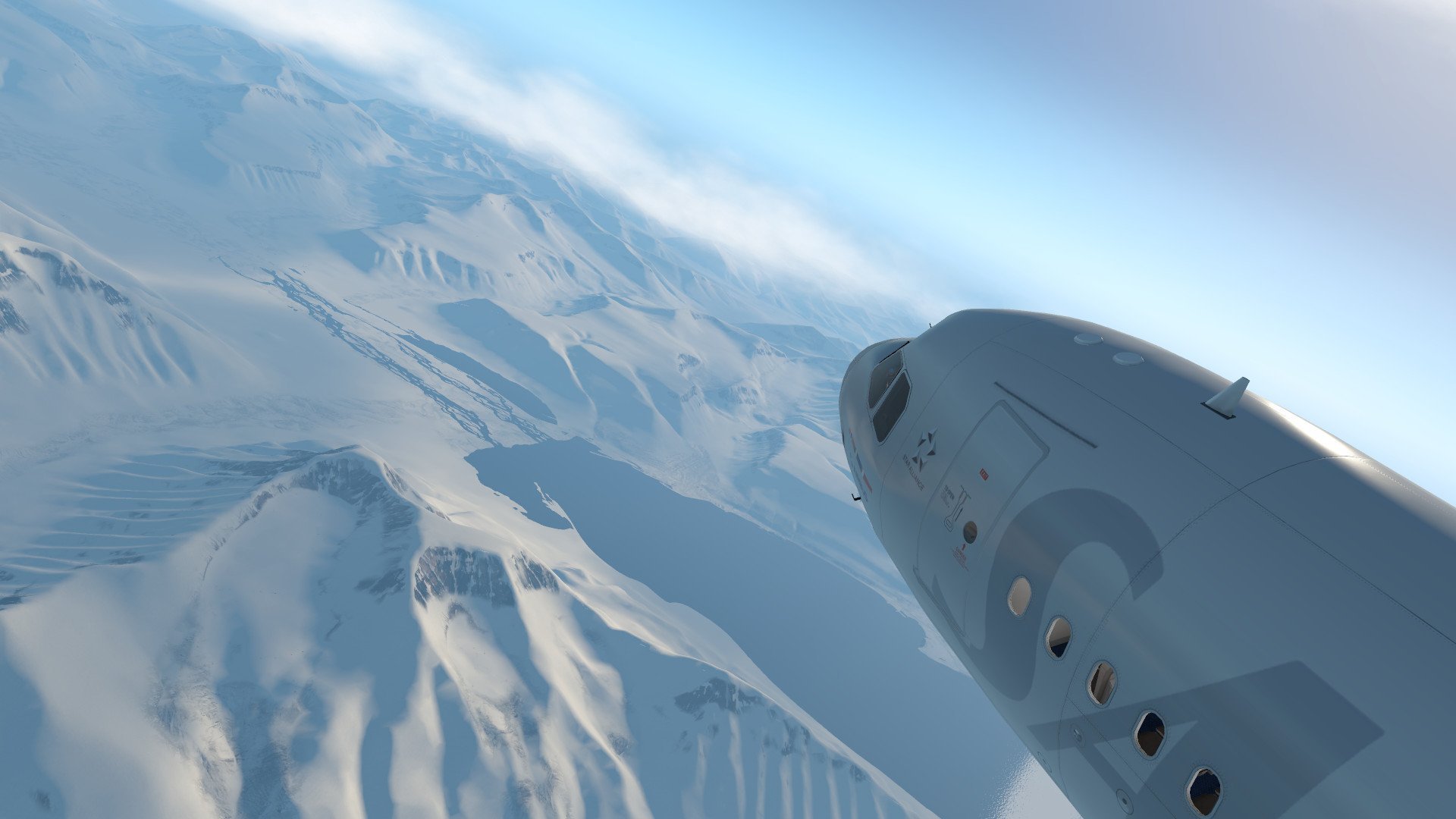
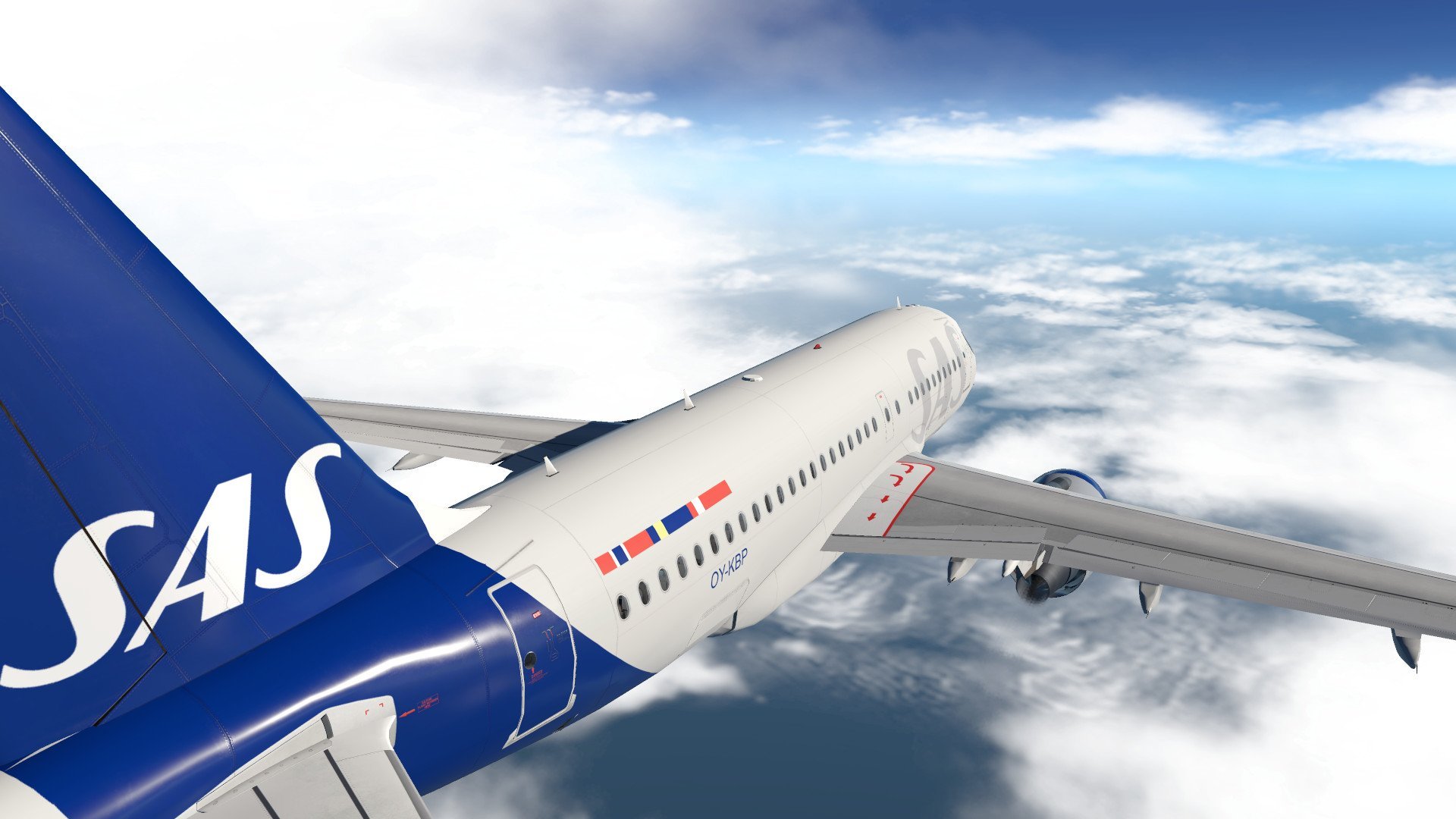
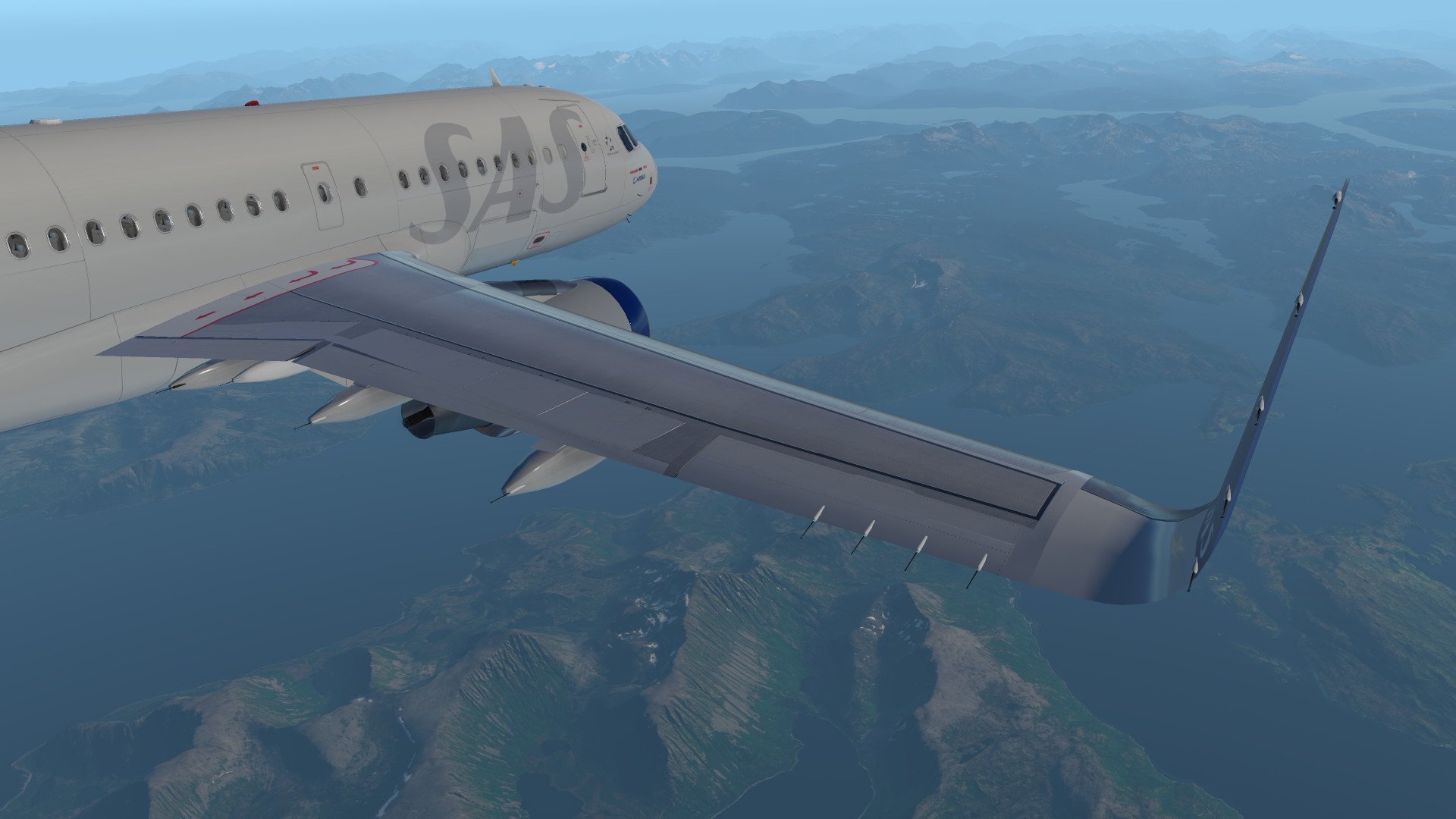
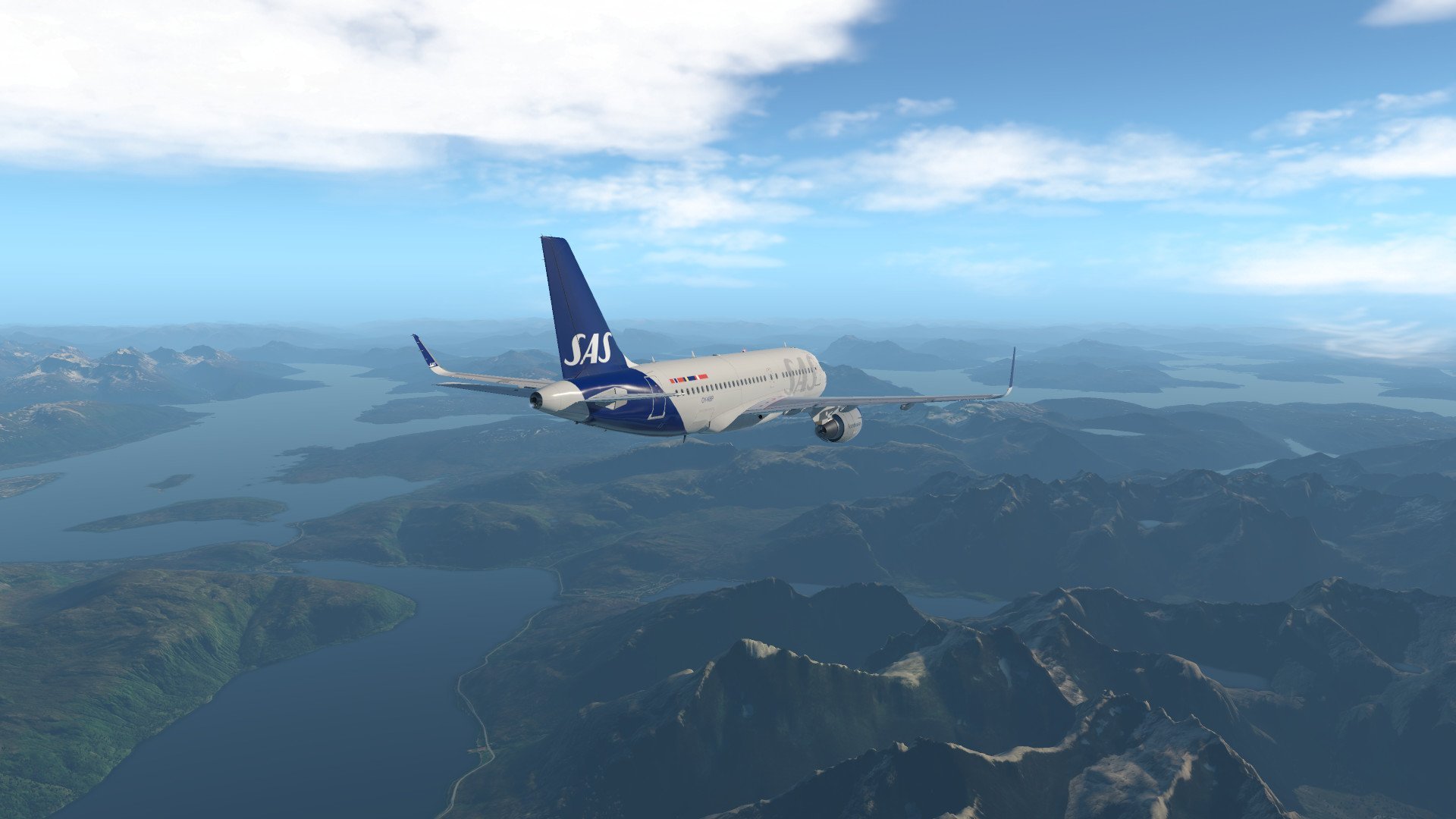
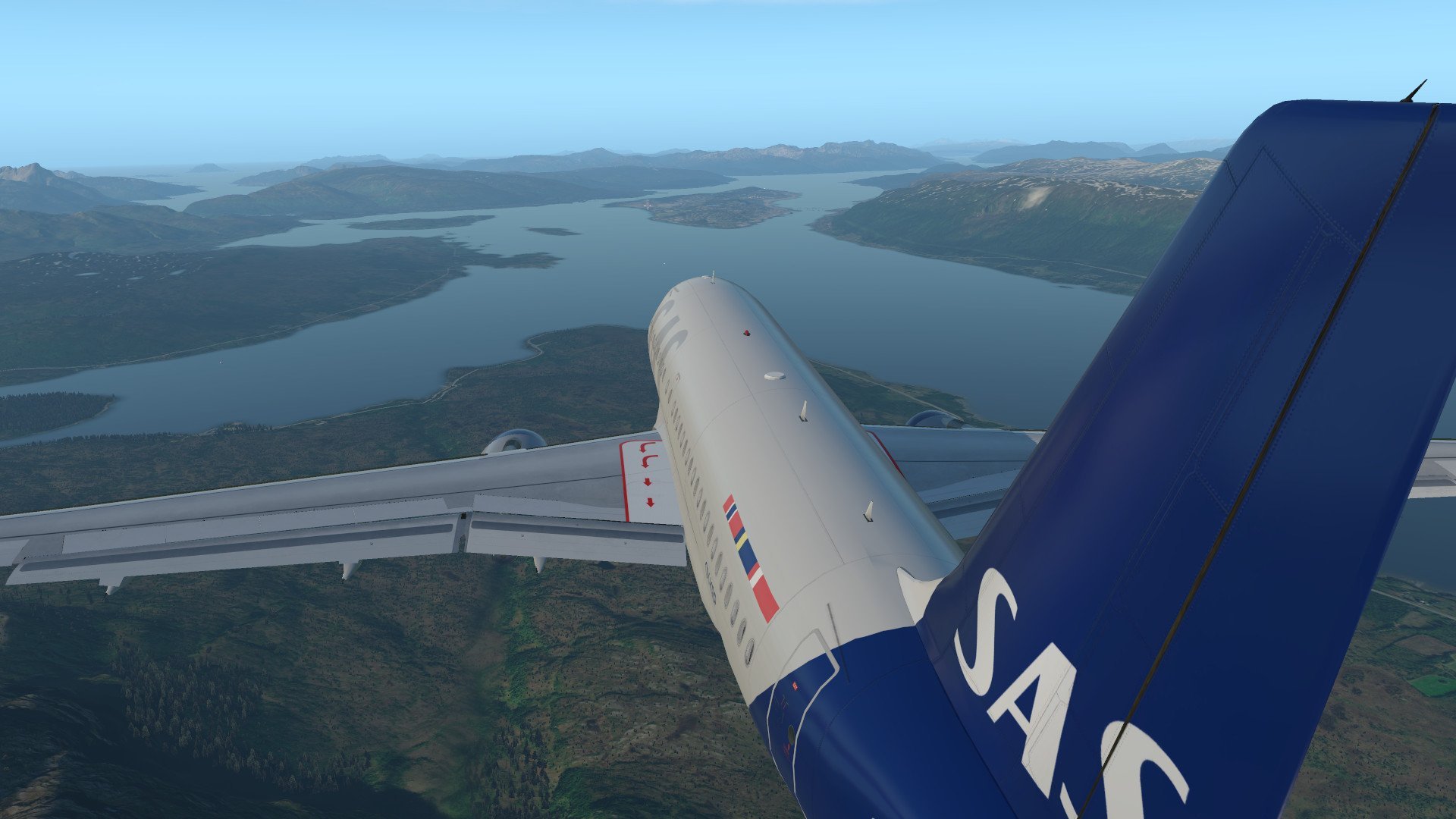
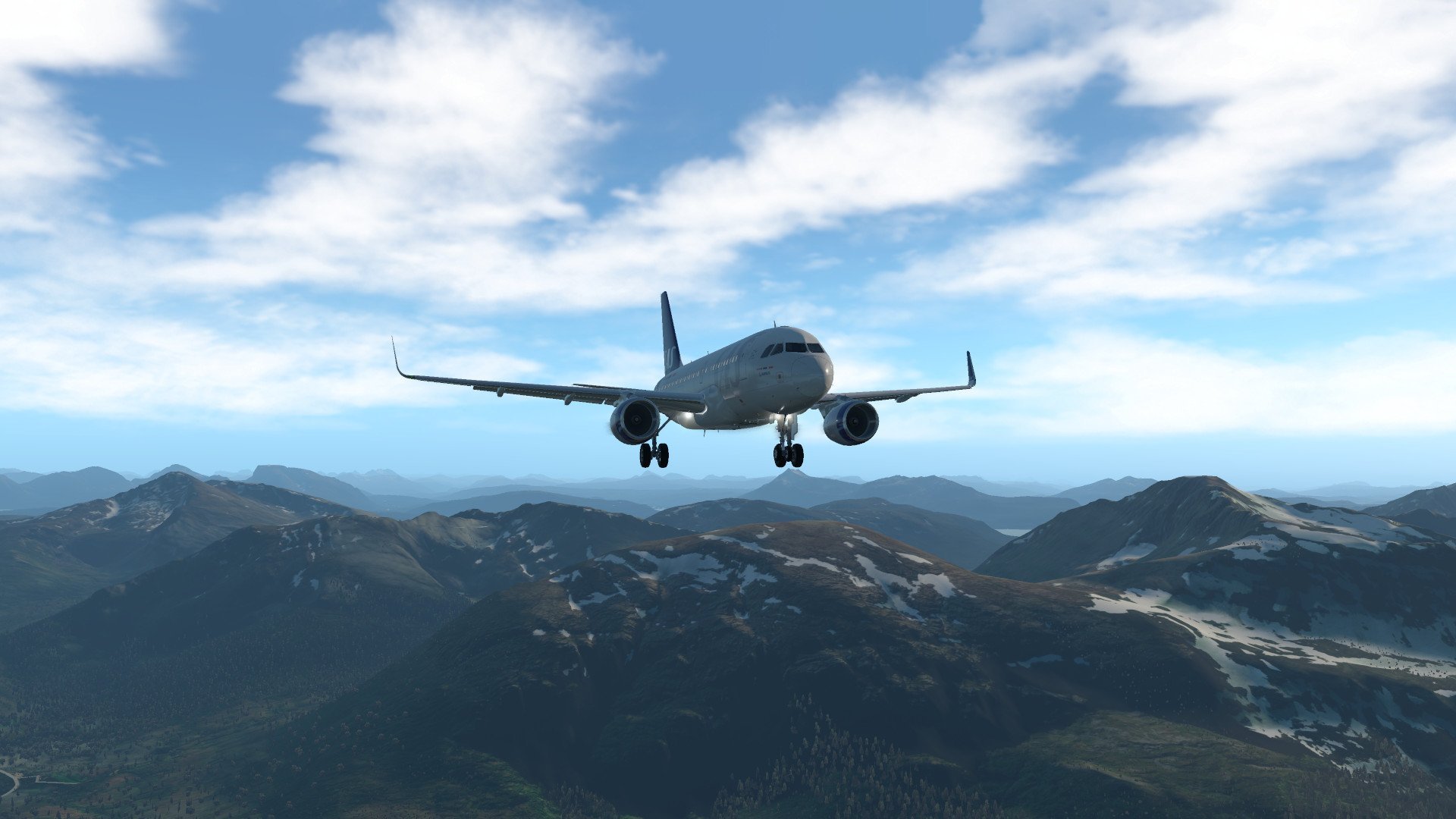
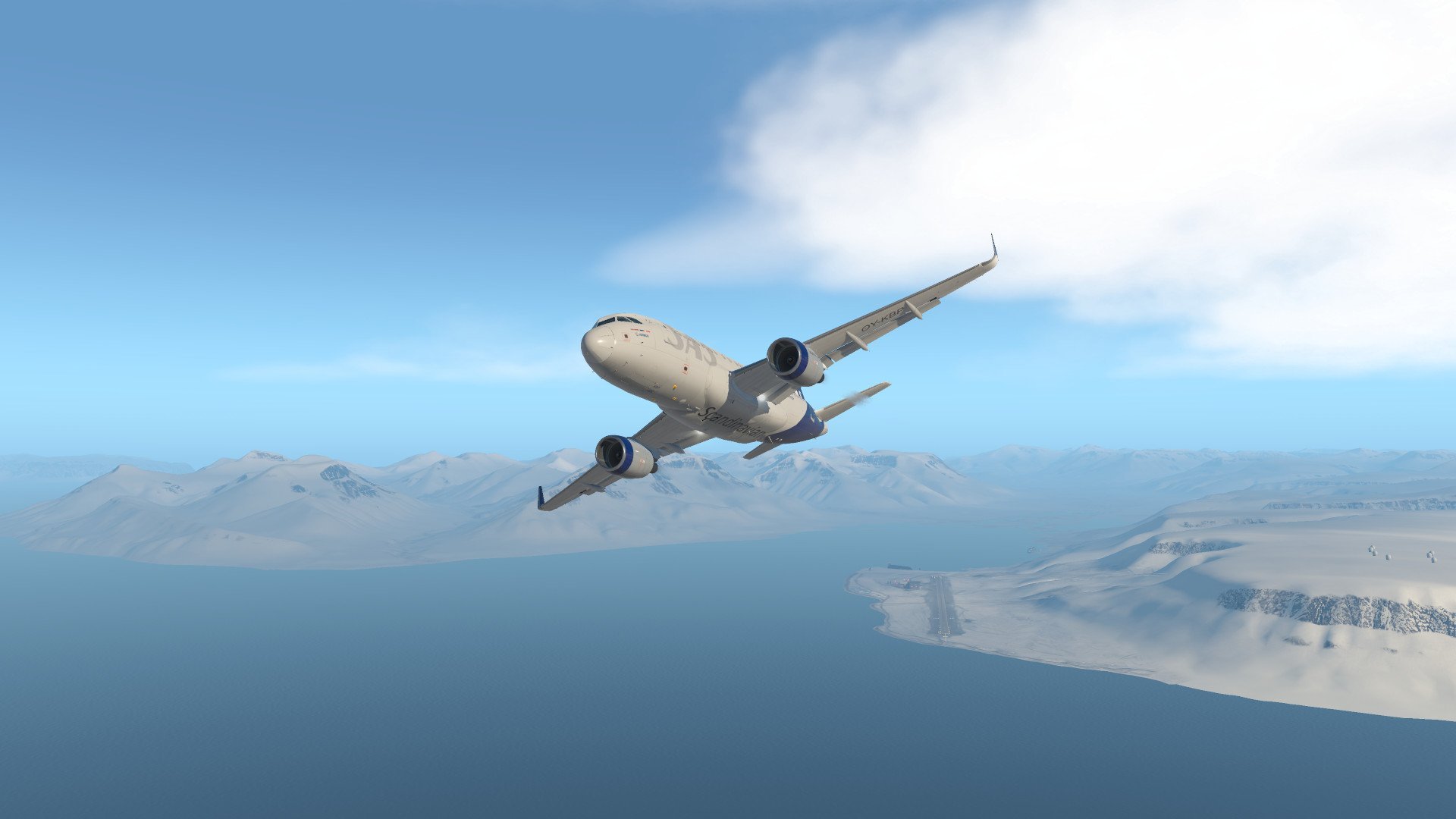
Dagens lille flytur... (OBS et par bilder) Vi starter motorene fra gate i herlige 7 grader Etter takeoff følger vi AMPIS1B ut mens vi klatrer Turner over Bolterdalen Setter videre kurs sørover På vei ned, bryter vi gjennom det aller øverste skylagene på omtrent 5900 meter. Titter over vingen i det vi passerer Store Måsværet og Nordkvaløya ish Følger med god fart og form en LOMVI4L arrival til ILS36 Passerer Brattbergtinden og Vengsøya lengst i bakgrunnen Flagger fargene til turistene på Ytterskaret Etablert på locolizer og gear down, config 3 Toucher ned med "Butter" - Log fra landing ( 2021-08-08 17:45:51,A319,-78.70,1.00 ) <Sier vel bare hardcore XP brukere mest Liten fugle i mektig natur.. Før vi taxer inn til gate. Parkert og takker samtidig for at du valgte å titte på denne SAS Allianse ruten fra Svalbard til Tromsø Lufthavn Langnes










-
Komisk, man skal donere penger for å få en vare, men det er ikke salg fordi man kaller det "å donere"?
- 16 svar
-
- 4
-
-
-
Er vel egentlig ingen som forsvinner fra denne hobbyen he he, men velkommen tilbake.
- 20 svar
-
- 1
-
-
Håper folk i det minste tenker seg to ganger om, dette tjener ingen av brukerne, kun de bak teppet
- 27 svar
-
- 4
-
-
Dette viser seg å være en måte å lure folk inn på som de selv må betale for. Pengen går ene og alene til alle "partnerne" i denne idiotiske nye ordinasjonen. Det er ikke en organisasjon for deg og meg, men en for de profesjonelle aktører. Anbefaler alle om å tenke to ganger..
-
How booooring....🤣 https://www.thresholdx.net/news/fsefsa
-
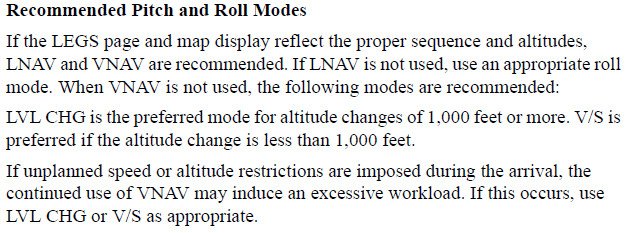
På 737 kan begge armeres så tidlig som på gate, men LNAV blir ikke aktivert før 400 fot og VNAV aktiveres ca 3000 fot eller når flaps er retracted. Grunnen til sistnevnte er at VNAV tilbyr ikke overspeed protection for leading edge devices. Slenger med denne som jeg tror kan være til god nytte
-
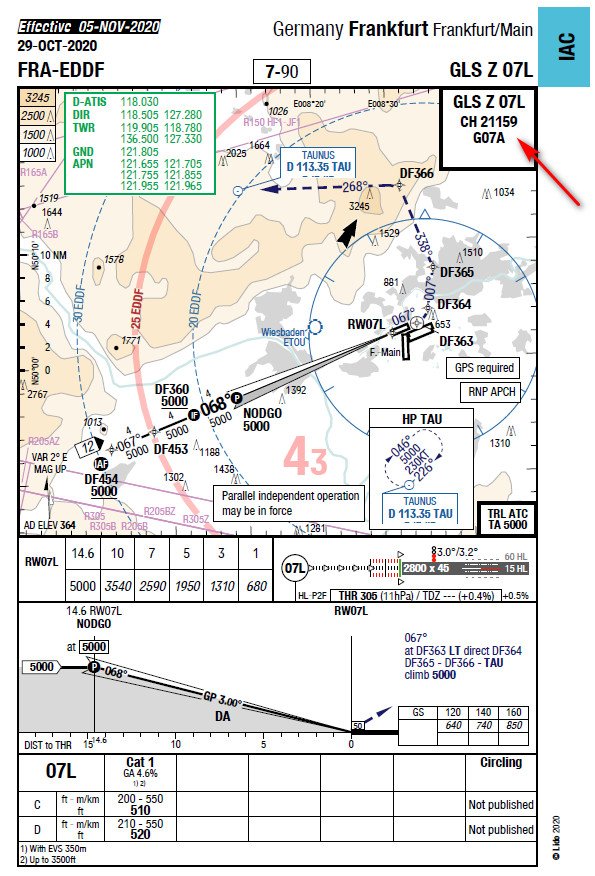
Glemte å ta med GLS siden det nå er på vei inn, dvs flere og flere flyplasser får det GLS = GBAS Landing System GLS eller GBAS landing system er et Global Navigation Satellite System (GNSS) alternativ til ILS. Kort fortalt bruker GBAS en fast installasjon på flyplassen til å overføre GNSS-data til fly som har dette utstyret installert. I flyet må du i tillegg ha installert MMR (Multi-Mode Reciever) som en del av GBAS avionics. Samme for ILS, men det krever ingen ekstra opplæring. Eneste betydelige forskjellen er at pilotene velger en femsifret kode, her et eksempel fra Frankfurt am Main Oppsummert kan vi på enkel godt norsk si følgende om alle disse typebetegnelsene.. 1. Bruk VNAV som en del av automatikken i flyet når du vil stige ned via FMS (programmert rute inkl høyder) 2. Bruk LNAV som en del av automatikken i flyet når du vil navigere etter en planlagt rute basert på waypoints eller fix innlagt i FMS ruten 3. Bruk HDG som en del av automatikken i flyet når du vil navigere etter vector instrukser fra ATC eller punkt og radialer i kart 4. Bruke LVL CHG (SPEED) som en del av automatikken i flyet når du vil ha kontroll over descenten/climb path (f.eks. fjerne kinetisk energi fra flyet ved decent gjennom decent management) 5. Bruk VS (ANGLE) som en del av automatikken i flyet når du vil ha kontroll på graden av descent eller climb. Ofte kjenkt ved små korrigeringer av høyde +- 1000 feet særlig under kontrollert luftrom og step-climb/descent. Håper min forståelse for hva den er verdt kan brukes til noe fornuftig, rettes om nødvendig
- 6 svar
-
- 1
-
-
Dette er et dypt inngående tema som helt sikkert @Jan Reidar Storelvmo kan utdype langt bedre enn meg. Men vi snakker her om GPS approacher og de ulike tekniske mulighetene er ment for å øke nøyaktigeten og redusere minimum vurderingshøyde for landing. RNAV eller Required Navigation Performance er en utvidelse av GPS og tilbyr slik jeg har forstått det, en mer presis vertikal posisjonsinformasjon. Dette er utenfor dagens muligheter for det globale posisjoneringssystemet (altså GPS). LNAV / VNAV-minimum bruker sertifiserte barometriske VNAV (baro-VNAV) -systemer for vertikal veiledning og / eller WAS-området (Wide Area Augmentation System) for å forbedre GPS-nøyaktigheten. Alt etter hva slags utstyr man har installert i flyet, så sertifiseres det til ulike typer approacher som LPV, LNAV/VNAV, LNAV LPV = Localizer Performance with Vertical Guidance Dette er bare tilgjengelig for fly med WAAS utstyr. LPV er den mest presise fordi CDI-nålen blir mer følsom jo nærmere du kommer til rullebanen. LPV vil tillate de laveste minimum - det er nær 200 fot - og det kommer også med en DA, ikke en MDA LNAV/VNAV = Lateral Navigation / Vertical Navigation Før LPV kom på banen var LNAV / VNAV det beste.. Baro-VNAV system, which are typically part of a flight management system (FMS). De ble designet for baro (lufttrykk) assistert GPS. Baroassistert GPS tillot flyet å motta vertikal veiledning fra en ikke-satellittnavigasjonskilde som det pitot-statiske systemet. BARO-VNAV system er typisk vanlig del av et flight management system eller FMS. De vil ha litt høyere minimum, men de bruker fortsatt en DA (Decision altitude). Tilnærmet CDI følsomheten blir den samme og når vi nærmer oss to miles fra den endelige tilnærmingen, er CDI-følsomheten ca en mil. Når du er to miles fra den endelige tilnærmingen til rullebanen, blir CDI-følsomheten 0,3 miles. LNAV = Lateral Navigation eller også kalt GPS NPA (Global Position System Non Precicion Approach) som bruker primært GPS eller SBAS Dersom man kun har LNAV altså lateral ( horisontal navigasjon) så vår man enda høyere minimum siden man ikke har vertikal navigasjon. Approachen bruker MDA ( Minimum Decision Altitude) og ikke DA. Denne type approach følger såkalte "stig-ned" punkter til "missed approach" punktet. RNAV / RNP (PBN) Høyeste krav til nøyaktiget i dag er nok slik jeg har forstått det, RNAV. RNAV er en del av det man kaller Performance Based Navigation (PBN). Jeg vil si PBN er en slags familie av nøyaktigets målings verktøy (he he, min tolkning) som tar sikte på å tilby piloter den mest nøyaktige måten å fly en approach på med minste muliget vurderings høyde. RNAV er brukt gjennom en navigasjon datamaskin (FMS) hvor waypoint mates inn i maskinen manuelt eller via en gitt database av ruter. Pilotene må lage en rute gjennom en serie med "waypoints" etter en flyplan. Datamaskinen estimerer da flyets posisjon ved bruk av gitte navigasjons sensorer og sammenligner da estimert posisjon med integrert database. Eksemple på dette kan være VNAV PATH som kalkuleres basert på ulike faktorer som Cost index, vind, ground speed, distance, altitude restrictions osv For å fly en RNAV approach, må flyet være satt opp med et RNAV system. Til alt dette er GNSS laget for å øke nøyaktigeten slik jeg har forstått det. Sist men ikke minst tar jeg med IAN = Integrated Navigation Approach. Dette betyr i bunn og grunnen en økt navigasjonsnøyaktighet fra programvare- og maskinvareforbedringer. Dette har på sikt ført til at flere forbedrede innflygingstyper ble utviklet for f.eks. Boeing 737. Disse utvidede innflygingstypene gir en konstant nedstigningshastighet etter en ca 3-graders glidebane, og fjerner den tradisjonelle nedtrappingsstilen (step-down) tilnærmingen. Sikkert en god del jeg ikke har touchet, men håper @Jan Reidar Storelvmo eller andre som faktisk er piloter kan utdype på. Tror man aldri blir helt utlært på dette området da ny teknologi ofte trår frem i lyset. Spiller ballen videre og rett meg dersom noe er feil
- 6 svar
-
- 1
-